ROS-Mobile es una aplicación de Bibliotecas y demos desarrollada por ROS-Mobile que se puede ejecutar en dispositivos móviles, pero con el mejor emulador de Android, LDPlayer, puedes descargar ROS-Mobile en tu computadora y disfrutarlo plenamente.
Al ejecutar ROS-Mobile en tu computadora, puedes ver claramente en una pantalla grande, y controlar la aplicación con el ratón y el teclado es mucho más rápido que con el teclado táctil, además, nunca tendrás que preocuparte por la duración de la batería de tu dispositivo.
Con la función de multi-apertura y sincronización, incluso puedes ejecutar múltiples aplicaciones y cuentas en tu PC.
Además, la función de transferencia de archivos facilita el intercambio de imágenes, videos y archivos.
Descarga ROS-Mobile y ejecútalo en tu PC. ¡Disfruta de la pantalla grande y la alta calidad de imagen en tu PC!
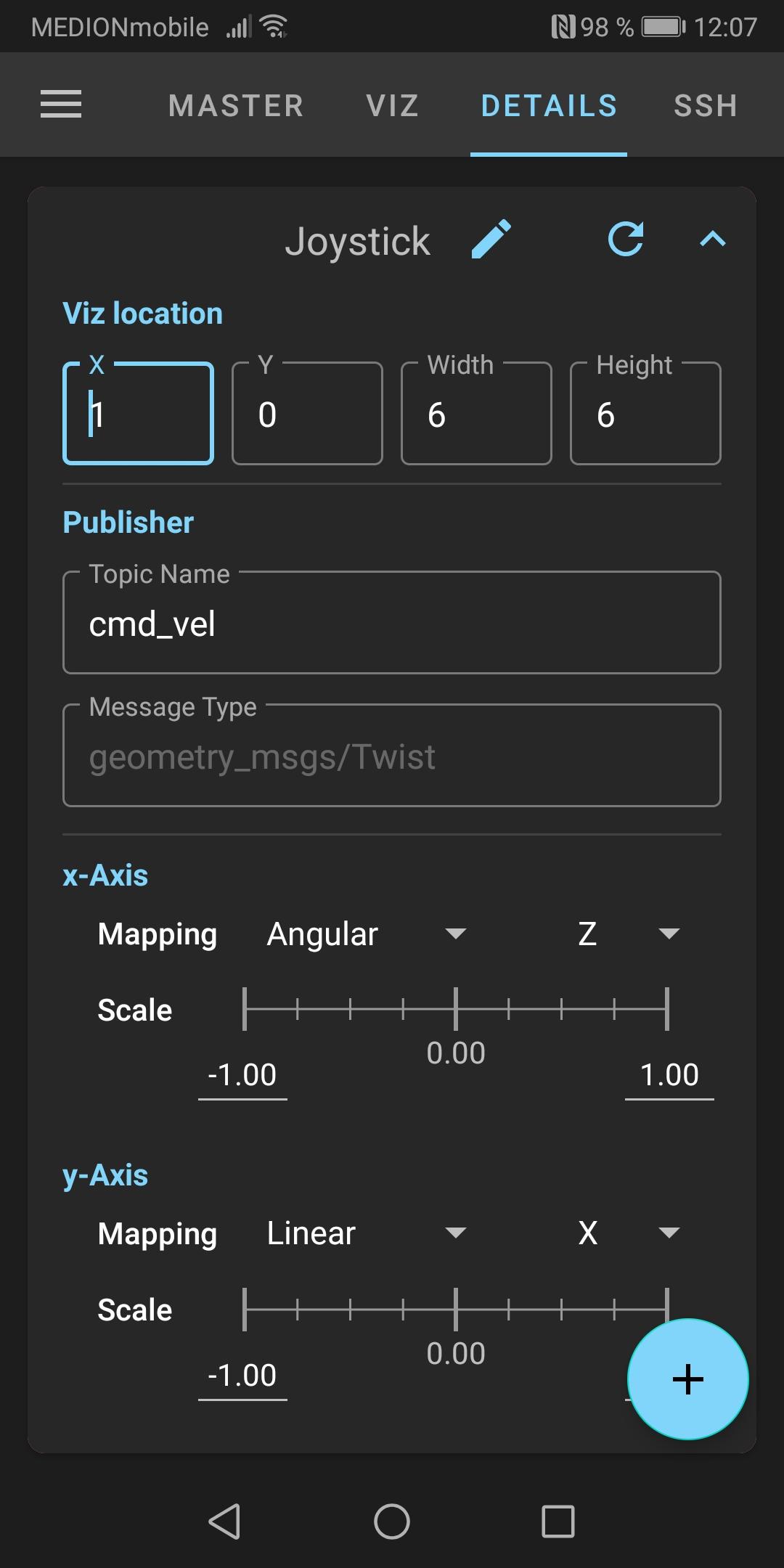
ROS-Mobile es una aplicación de Android diseñada para el control dinámico y la visualización de un sistema robótico móvil operado por el Sistema Operativo de Robot (ROS). La aplicación utiliza nodos ROS que inicializan al publicador y al suscriptor con mensajes ROS estándar. El patrón de arquitectura de código general es Model View ViewModel (MVVM), que estabiliza la aplicación y la hace altamente personalizable.Si utiliza ROS-Mobile para su investigación, cite
@article {rottmann2020ros,
title = {ROS-Mobile: una aplicación de Android para el sistema operativo del robot},
author = {Rottmann, Nils y Studt, Nico y Ernst, Floris y Rueckert, Elmar},
journal = {arXiv preprint arXiv: 2011.02781},
año = {2020}
}
Para más detalles eche un vistazo a nuestra página de GitHub (busque ROS-Mobile)